
智能交通论文教授推荐10篇之第三篇:研究如何提升城市流动性的智能交通系统
摘要:分析表明,智能交通系统(ITS)旨在提高安全性、机动性和安全性道路运输的环保表现。提升城市流动性的智能交通系统(INSIGMA)提供了一个全新的解决方案通过增强功能和准确性,这位提升城市的智能化水平提供了新的可能。介绍了该系统的结构、传感器、及系统的优点。
关键词:智能交通; 视频检测器; GPS; 路线规划; 交通控制;
Abstract:
Its aims to improve the environmental performance of safety, mobility and safe road transportation. The intelligent transportation system(INSIGMA) to improve the mobility of the city provides a new solution. By enhancing the function and accuracy, it provides a new possibility to improve the intelligent level of the city. This paper introduces the structure, sensor and advantages of the system.
Keyword:
intelligent transportation; video detector; GPS; route planning; traffic control;
1 引言
现代智能交通系统(Intelligent Transport System,ITS)是帮助应对交通拥堵的有用且必要的工具。预计动态交通控制和车辆导航将在很大程度上提升道路基础设施的发展[1].目前,这类系统主要基于从历史交通统计中获得的统计数据,而只有这些数据是远远不够的,特别是在与事故和道路碰撞有关的交通情况突然增加的情况下。在实践中,交通控制往往基于交通动力学的低频分量。在大规模流量事件中,现有的系统无法足够快速地响应。在这种情况下,交通问题最早可以在发生半小时后才检测到。动态流量组件仍然没有得到处理,相关的流量条件需要用户提前或在事件发生的地方亲自识别。因此,在大都市拥挤的情况下,路线优化的效率往往远远低于预期。这在紧急服务、消防队、警察等的日常行动中特别重要。另一个问题是传感器设备的覆盖范围有限。交通探测器主要部署在主要的高速公路上,但在通道上的使用非常少。除了在基础设施中增加更多的传感器外,开发使用摄像机和其他传感器的视觉目标观测和轨迹参数注册的自动化方法也至关重要。这些系统将为生成动态地图提供道路交叉口的低电平数据。
2 提升城市流动性的智能交通系统
INSIGMA智能交通系统集成了多个底层技术:传感器、数据解释、通信、信息集成和控制,从而构建一个大型、高效、实时的工具来优化交通。其发展的主要目标是安全性、流动性和环保性能。其在各地的发展,希望能显著减少事故数量,增加道路网络的吞吐量,限制出行时间和能源消耗,减少污染,改善出行舒适度和驾驶条件。其他预期的好处包括降低运输、物流管理和道路基础设施维护的成本。服务分类包括30多个项目,分为以下几类:(1)旅客信息(路线规划、行车信息、天气路况信息、路线指引);(2)交通管理(交通规划、交通管制、执行交通规例、基础设施维修);(3)紧急支援功能(ESF-提供紧急服务、加强资料共享、紧急管理及运作、生物危害情况下的运输运作);(4)车辆服务(车辆对车辆V2V、车辆对基础设施V21/V2X、视觉增强、自动车辆操作、避免碰撞、安全就绪);(5)定期公共交通(RPT,管理,需求响应运输管理,共享运输);(6)电子收费;(7)商用车工具(行政流程、车载安全监控、车队管理)。
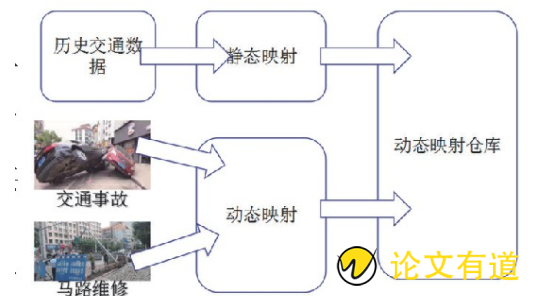
图1 提升城市流动性的智能交通系统(INSIGMA)解决方案
INSIGMA系统基于三个主要的面向数据的组件:静态映射、动态映射和动态映射仓库,如图1所示。它们分别处理与运输基础设施有关的慢变化、快变化和历史数据。缓慢变化的数据涉及道路基础设施,包括道路、路口、车道、交通标志和道路可达性等细节。可达性参数决定特定的道路是否适合特定的用户,如普通车辆或紧急车辆。例如,紧急车辆可以使用人行道,而普通车辆则不能。快速变化的数据涉及动态参数,即所谓的监控参数,它表示当前或最近的交通状况和事件,包括:威胁报告或侦测。历史数据将快速变化的聚合数据与缓慢变化的数据对象联系起来。将其从动态参数中分离出来提供了对卸载动态映射进行基于时间的分析的方法。这三个数据存储所收集的数据可以通过基于Web服务的接口访问:IMS(INSIGMA-Map-Static)接口、IMD(INSIGMA-Map-Dynamic)接口和IHD(INSIGMA-wareHouse-Dynamic)接口。此外,动态地图仓库提供了一个OLAP(联机分析技术)接口,允许进行特别的多维度分析。该系统还具有用于内部高性能通信的基于sol的"原始"接口。它们主要用于数据从地图传输到仓库期间ETL(提取、转换、加载)过程,由动态映射ETL组件执行。
3 INSIGMA系统中的传感器设置方案
指导动态地图设计的一个重要要求是能够集成各种类型的传感器,提供有关交通状况的信息。它们包括街头摄像机、感应回路、麦克风阵列、气象站和车辆跟踪设备。在本节中,我们将讨论两种可视为互补的传感器:视频探测器和GPS跟踪器。
3.1 INSIGMA视频探测器
视频检测器是一种设备的传统名称,它对来自摄像机的视频流进行计算机分析,以确定观察到的参数(例如流量)。每个摄像机由一个视频检测器实例处理。在配置文件中,用户必须定义进行分析的区域。其中包括限制计算队列长度的车道的多边形,以及用于计算车辆数量和计算瞬时速度的虚拟线。真实场景的配置如图2所示(矩形内的数字是被检测对象的标识符;在虚拟线附近给出了车辆计数的结果)。
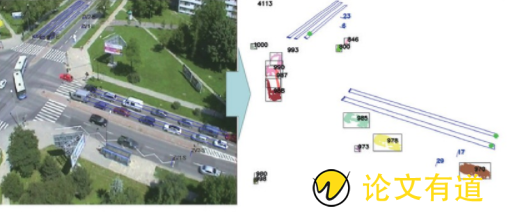
图2 视频探测器的场景图形输出
这些参数在指定的时间范围内取平均值,通常是一个完整的交通信号灯周期。平均流量参数通过基于gsoap包的接口传递给数据库(动态映射)。提出一种基于光流法的车辆运动目标检测方法。基于光流计算的方法相对于使用背景生成的方法的优点是车辆检测性能独立于天气条件,而且检测与背景颜色相似的车辆是可能的。然而,使用光流需要开发算法来跟踪被探测车辆并记住它的位置,特别是当它们被停止时。在几种测试方法中,选择了霍恩schunck算法,因为它被证明是相当快和足够准确的。最初使用的是我们自己的方法实现。后来,它被从OpenCV库更改为霍恩schunck实现,它提供了可比较的结果,并且运行速度快了两倍。在分割时使用光流模量,采用固定阈值进行二值化。该算法考虑了以下几个问题:把一个物体分成几个部分,把几个物体连接成一个物体,记住暂时停止的物体。图2的底图是对摄像机拍摄的一个场景的分析结果。正确检测车辆队列长度。他们用圆圈做标记。在上面三个排队区域只有一个点,因为只有一辆车停下来。在较低的队列区域,由于车辆排成长龙,因此在分析区域的末端放置两个点。视频编码算法正确地分割出队列对应区域以下的三辆车。然而,由于屋顶颜色统一,巴士被分成了几个部分。这将被纠正在车辆计数时,因为节是互相接近,并在同一方向移动。
3.2 GPS跟踪器
多年来,提供车辆定位信息的传感器(主要是GPS接收器)被用来提供个人路线规划服务。本文设计的新系统从装有GPS接收器的移动终端接收原始数据。它们可以缓冲内部内存中的GPS读取,并以批量方式发送大量记录。系统也可以接受来自模拟器的数据。(1)原始样品经过预处理。这一步包括轨迹平滑与卡尔曼滤波(摆脱离群点)和插值点之间的GPS读数。第二步是匹配地图密度,处理隧道中GPS信号消失等情况。(2)然后,将经过清理和规范化的样本提交给实现映射匹配算法的组件。该算法需要地图数据。在描述的简单状态中,它的来源是Open Street Map(OSM)。为了加速计算,地图数据被存储在内存中。在履带车辆的输出轨迹上进行馈电到数据库中。(3)流量参数通过周期性激活的流量参数计算过程确定,并存储在另一个数据库中。该步骤还涉及基于值和时间戳的数据聚合。我们计算了两个参数:道路链路的平均速度和遍历时间。(4)计算出的轨迹可用于车辆的在线跟踪。这种功能可以交付给外部客户,在城市环境中提供基于车辆的服务。此外,该系统具有内建规则,能够根据车辆当前速度与路段计算中位数之间的差异来检测意外的驾驶员行为。(5)分配给道路链路的交通参数可由ITS的其他组件使用:路线规划或交通控制。为了测试目的,该系统还提供了地图可视化。
4 结语
INSIGMA系统将使接口能够访问最优路线、危险事件信息和其他智能服务。期待本系统在相关领域的应用有助于智能交通的发展。
参考文献
[1]李炬,韩伟莉。基于神经网络的智能交通控制系统构建[J].价值工程,2019,38(19):203-205.