
交通灯毕业论文最新范文8篇之第七篇:智能交通系统对减少交叉路口的车辆延误的作用
摘要:本文提出了一种基于模糊控制的交叉路口交通灯控制系统, 这种模糊控制系统以现代交通活动的困难实际为基础, 对单交叉路车长、车场之差为输入, 以绿灯延时为输出。并简单介绍了这种智能交通控制系统基于单片机的实现方法, 经过实践测试认为, 在设计基础上实现的智能交通系统能够有效的减少交叉路口的车辆延误, 是解决当前交通压力的重要方法和途径。
关键词:模糊控制; 实时模糊控制系统; 交叉路口; 交通灯;
在城市交通系统运行过程中, 因为车辆走行的不确定性, 给交叉路口的交通管制系统带来了很大的随机性和模糊性问题, 很难建立一个数据模型对实际的交通状况进行描述和模拟。在这种情况下模糊控制理论、现代渗井网络等智能技术的应用成为交叉路口交通灯运行效率提升的主要方式, 因此对交叉路口交通灯实时模糊控制系统的研究具有鲜明的现实意义。

1 模糊子集及论域
模糊控制系统是现代智能交通系统的核心, 从设计角度看智能交通系统的模糊控制器由模糊化接口、知识库、模糊推理、清晰化模块等四个部分组成。在智能交通系统的实际运行中, 典型的较差路口会有东南西北四个方向组成, 而每一个方向又分别有右转、直行和左转三股车流。根据这一实际情况智能交通管控系统应该在直行和左转道上设置两个监视器, 其中一个设置在停车线位置, 主要的监测对象是直行和左转车辆的离开数量, 一个设置在直行和左转来车道适当位置, 对两个车道的来车数量进行监测, 设X为当前区域绿灯方向车辆等待长度, X1为当前区域红灯方向车辆长度与绿灯方向车辆长度之差, T为绿灯延时。
在智能控制系统的实际应用中, 模糊控制系统的运行机制如下, 以车辆队伍长度X和车辆队伍之差X1作为控制数据的输入, 以实际上绿灯的延时为输出, 以此原则为基准制定一个模糊控制规则表, 作为智能交通控制系统的运行规则。具体如下:
(1) X的模糊子集为7个:VL (很长) 、L (长) 、LL (较长) 、M (中等) 、LS (较短) 、S (短) VS (很短) .
(2) X1的模糊子集为7个:PB (正大) 、PM (正中) 、PS (正小) 、O (零) 、NS (负小) 、NM (负中) 、NB (负大)
(3) T的模糊子集为7个:VR (很多) R (多) LR (较多) M (适中) LF (较少) F (少) VF (很少)
2 模糊变量赋值
在模糊变量的集合和规则确定以后, 应该对模糊语言的变量进行线性函数的确定, 即要对模糊变量进行赋值, 确定模糊控制系统运行过程中各个具体元素对语言变量的归属度, 根据模糊控制系统的运行机制可以确定模糊变量的输入和输出数据为X、X1、T的变量值。
3 模糊控制规则表及控制的实现
对智能交通控制系统的各项变量进行明确以后, 应该根据控制系统应用的实际情况和交通管理部门希望达到的交通管理标准, 对模糊控制系统进行规则设置。对系统两个主要输入元素的变化结合形式进行推算, 并对不同的变化结合代表的不同交通管理形式进行印证分析, 进而结合交通管理部门的交通管理规则和要求, 按照隶属度最大的原则对系统运行数据进行模糊判决。具体控制规则表如表1所示。
通过一一对应的控制规则表, 现代智能交通控制系统就能够实现对交叉路口交通状况的实时监控, 同时输入信息进入到系统与控制规则表进行对比, 执行机构就能够对输出信息--绿灯延时时间进行调整, 确保智能交通系统对交通环境的实时适应性, 对交叉路口交通灯进行实时调整, 以最大限度的优化道路资源和交通系统的使用效率, 保证城市交通的安全、畅通。
4 结论与分析
交叉路口一直是城市交通拥堵的重灾区, 交叉路口交通灯交通疏导效率的提升一直是城市交通问题解决的重要突破口, 因为城市车辆流动的不确定性, 借助传统的数据模型对交叉路口交通灯实行管理存在严重的现实问题, 所以借助模糊控制技术实现交叉路口交通等的智能化控制是当前交通等控制领域的主要发展方向, 本文从模糊子集及论域、模糊变量赋值、模糊控制规则表及控制的实现三个方面对这一系统进行了简要分析, 认为基于模糊控制技术形成的交叉路口交通等智能控制系统, 能够对交叉路口车辆拥堵的实时情况进行监测, 并以绿灯方向车辆等待长度和红灯方向车辆长度与绿灯方向车辆长度之差作为输入数据, 按照模糊控制规则表控制绿灯的延时时间, 能够很好的提高交叉路口交通灯疏导效率。
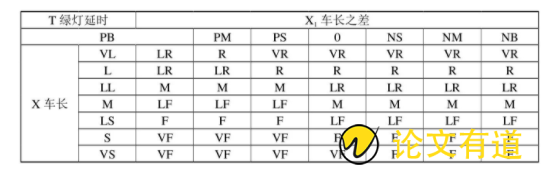
表1:模糊控制规则表
参考文献
[1]易俊华。城市道路交叉路口交通信号模糊控制系统设计与实现[D].中南大学, 2010.
[2]易俊华, 朱红求, 阳春华。交叉路口交通灯实时模糊控制系统设计与实现[J].工业控制计算机, 2011, 01:47-48.
[3]文孟飞。城市智能交通系统交通流协同优化与诱导关键技术研究[D].中南大学, 2013.
[4]王炜。城市道路交通模糊智能监控系统的设计与研究[D].武汉理工大学, 2008.
[5]王晓薇。基于GA的交通信号自适应模糊控制研究及仿真软件开发[D].浙江大学, 2004.