
摘要:针对现行交通灯在联控与智能化管理方面多存在的不足,利用环形线圈检测器来探测车道内车辆的通过,利用PLC内置的计数器对车辆数进行计数并计算出各方向车道的车辆通行量,检测实时交通流信息,为PLC提供输入数据,PLC通过输入数据智能选择控制方案,将信号配时与区域协调方案相结合,达到实时协调控制城市路网交通,提高十字路口交通控制效率。
关键词:模糊控制; 环形线圈检测器; 区域协调;交通灯
0 引言
随着社会经济的飞速发展和社会生活水平的迅速提高,路面上的机动车数量也随之迅速增长,导致交通拥堵时有发生。为更大限度的提高道路的运力,将单叉交通灯模糊控制系统与区域协调方案相结合,达到实时协调控制城市路网交通的目的。
1 单交叉模糊控制系统
系统控制流程.本系统为双输入-单输出模糊控制器,系统的输入变量来源于车辆检测器检测到的交通流信息,输出变量为实时输出相位绿灯延时。
单交叉口模糊控制器是其核心。首先通过由车辆检测器组成的交通信息采集系统,检测实时交通流信息,为单交叉口模糊控制器提供输入数据信息,生成控制方案,产生信号配时,来疏散交通流,达到提高运力。
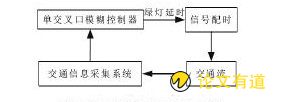
图1 交叉口模糊控制系统控制流程
2 区域协调规则
一级模糊控制系统规则库的设计。如果沿东西方向通行的车辆数量较多,则应增加东西方向绿灯的放行时间,从而减少东西方向通行的压力;如果南北方向通行的车辆数量较多,则应增加南北方向绿灯的放行时间,从而减少南北方向通行的压力。如果东西和南北方向通行的数量都比较多,为了提高通行效率,同时增加东西和南北方绿灯的放行时间。根据以上分析,得出区域协调控制一级模糊控制规则表如表1所示。
3 单叉交通灯模糊控制系统与区域协调的融合
仅实施单叉交通灯模糊控制有一定的弊端,可能会出现:在城市路网中,某一区域的交通通行流畅,而与之相邻的另外某个区域出现交通严重拥堵的现象。为了解决这一问题,需要对子区域进行协调控制,以实现城市区域范围内路网的畅通。
4 结语
本文将模糊控制算法与区域协调控制有机的结合,并将其应用在单叉交通灯控制系统中,可以不仅可以提高交通运输网中单叉路口的通行能力,还可以提高交通运输网整体的同行能力,可以有效降低车辆在通行过程中的等待时间。对于提高道路的运力具有重要的现实意义,能够在一定程度上环节交通拥堵的压力。
参考文献
[1]杜长海.计算智能及其在城市交通诱导系统中的应用研究:(博士学位论文).重庆:重庆大学,2009.
[2]解菲.浅析我国城市交通管理与控制.中国市场,2008,43(15):18-19.
[3]李艳等,基于模糊控制的城市交叉路口群信号控制及仿真.交通运输工程学报.
[4]陈建勤等,模糊控制系统的闭环模型及稳定性分析.自动化学报.
[5]李洪忠,基于模糊控制的智能交通灯系统的研究与设计,兰州交通大学硕士论文.